
Phần 2 – Tầng vật lý CAN: Dây dẫn, điện áp, termination và topology
Sau khi đã nắm được khái niệm cơ bản về CAN Bus ở phần trước, trong bài viết này BKAII sẽ cùng bạn đi sâu vào tầng vật lý CAN (CAN Physical Layer) – nền tảng quyết định trực tiếp đến độ ổn định, khả năng chống nhiễu và độ tin cậy của toàn bộ mạng CAN.
1. Tổng quan tầng vật lý CAN
Tầng vật lý CAN được chuẩn hóa theo ISO 11898, quy định:
- Kiểu dây dẫn và phương thức truyền tín hiệu
- Mức điện áp logic trên CAN_H và CAN_L
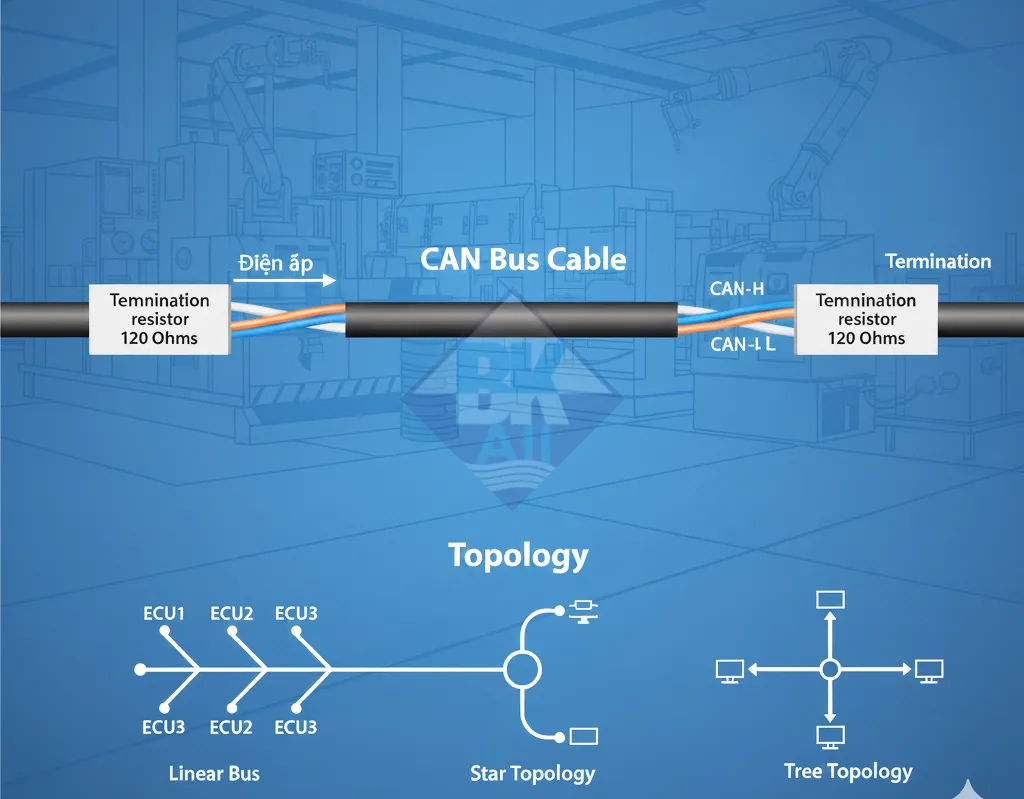
- Cách đấu điện trở kết thúc (termination)
- Topology mạng CAN và giới hạn chiều dài cáp theo bitrate
Khác với RS-232 hay RS-485 truyền tín hiệu đơn cực, CAN sử dụng truyền vi sai (differential signaling), giúp hệ thống hoạt động ổn định trong môi trường công nghiệp nhiều nhiễu điện từ.
2. Dây CAN_H / CAN_L và nguyên lý truyền vi sai
Một mạng CAN Bus tiêu chuẩn chỉ cần hai dây tín hiệu:
- CAN_H (CAN High)
- CAN_L (CAN Low)
Dữ liệu trên CAN không phụ thuộc vào điện áp tuyệt đối của từng dây, mà dựa trên sự chênh lệch điện áp giữa CAN_H và CAN_L. Nhờ đó, nhiễu tác động đồng thời lên cả hai dây sẽ bị triệt tiêu.
Trạng thái Dominant và Recessive
- Dominant (logic 0): CAN_H tăng lên ~3.5V, CAN_L giảm xuống ~1.5V
- Recessive (logic 1): CAN_H ≈ CAN_L ≈ 2.5V
Trong quá trình arbitration, bit dominant luôn ghi đè bit recessive, đây là cơ sở để CAN thực hiện cơ chế ưu tiên thông điệp mà không gây lỗi truyền.
3. Điện trở kết thúc CAN – Termination 120Ω
Một trong những nguyên nhân phổ biến gây lỗi CAN là đấu sai hoặc thiếu điện trở kết thúc. Theo chuẩn ISO 11898:
- Mạng CAN phải có 2 điện trở 120Ω
- Đặt tại hai đầu vật lý của bus
- Điện trở được đấu giữa CAN_H và CAN_L
Điện trở termination có nhiệm vụ:
- Giảm phản xạ tín hiệu (signal reflection)
- Ổn định biên dạng xung
- Đảm bảo truyền dữ liệu chính xác ở tốc độ cao
⚠️ Lưu ý: Không đấu termination tại các node ở giữa bus. Quá nhiều điện trở sẽ làm suy giảm biên độ tín hiệu CAN.
4. Topology mạng CAN chuẩn
CAN sử dụng topology dạng bus tuyến tính (linear bus). Tất cả các node được nối song song trên cùng một đường bus chính.
- Không dùng topology hình sao (star)
- Không dùng vòng (ring)
- Hạn chế nhánh rẽ (stub)
Chiều dài stub (nhánh rẽ)
Stub càng dài thì phản xạ tín hiệu càng lớn. Khuyến nghị:
- < 0.3 m với CAN tốc độ cao (500 kbps – 1 Mbps)
- < 1 m với CAN tốc độ thấp
5. Giới hạn chiều dài cáp CAN theo bitrate
Tốc độ truyền CAN càng cao thì chiều dài bus tối đa càng ngắn. Bảng tham khảo phổ biến:
| Bitrate | Chiều dài bus tối đa |
|---|---|
| 1 Mbps | ~40 m |
| 500 kbps | ~100 m |
| 250 kbps | ~250 m |
| 125 kbps | ~500 m |
| 50 kbps | ~1000 m |
Trong thực tế công nghiệp, việc lựa chọn bitrate cần cân bằng giữa tốc độ – khoảng cách – độ ổn định.
6. Các lỗi đấu dây CAN phổ biến
- Thiếu hoặc dư điện trở 120Ω
- Đấu topology hình sao
- Stub quá dài
- Đảo CAN_H / CAN_L
- Dây không xoắn cặp hoặc không chống nhiễu
- Không nối mass tham chiếu giữa các thiết bị
Những lỗi này thường dẫn đến:
- CAN error frame liên tục
- Node tự động chuyển sang trạng thái bus-off
- Mất truyền thông ngắt quãng, khó chẩn đoán
7. Kết luận
Tầng vật lý CAN tuy đơn giản về số lượng dây, nhưng lại đòi hỏi tuân thủ nghiêm ngặt tiêu chuẩn đấu nối. Hiểu rõ CAN_H / CAN_L, termination, topology và giới hạn cáp sẽ giúp bạn xây dựng hệ thống CAN ổn định ngay từ đầu, giảm đáng kể lỗi khó chịu trong quá trình vận hành.
Xem thêm:
- Bitrate & Timing CAN Bus – Sample Point, Clock Tolerance & Lỗi Đồng Bộ
- Bộ chuyển đổi CAN sang Modbus ADFweb – Giải pháp Gateway CAN ↔ Modbus RTU/TCP cho máy móc
- CAN / CAN Converter / Bridge của hãng ADFweb - Ý
BKAII – Thiết bị truyền thông TỐT nhất với giá CẠNH TRANH nhất