
PROFIBUS có hỗ trợ real-time không? Hiểu đúng bản chất để thiết kế hệ thống
Một trong những câu hỏi phổ biến khi thiết kế hệ thống tự động hóa là: PROFIBUS có phải là mạng real-time hay không? Câu trả lời không đơn giản là “có” hoặc “không”, mà phụ thuộc vào cách hiểu về real-time trong công nghiệp.
Nếu bạn cần nhìn lại toàn bộ kiến trúc PROFIBUS, bạn có thể tham khảo hub PROFIBUS hoặc bài kiến trúc DP-V0, V1, V2 để có nền tảng trước khi đi sâu vào khái niệm này.
1. Real-time trong công nghiệp nghĩa là gì?
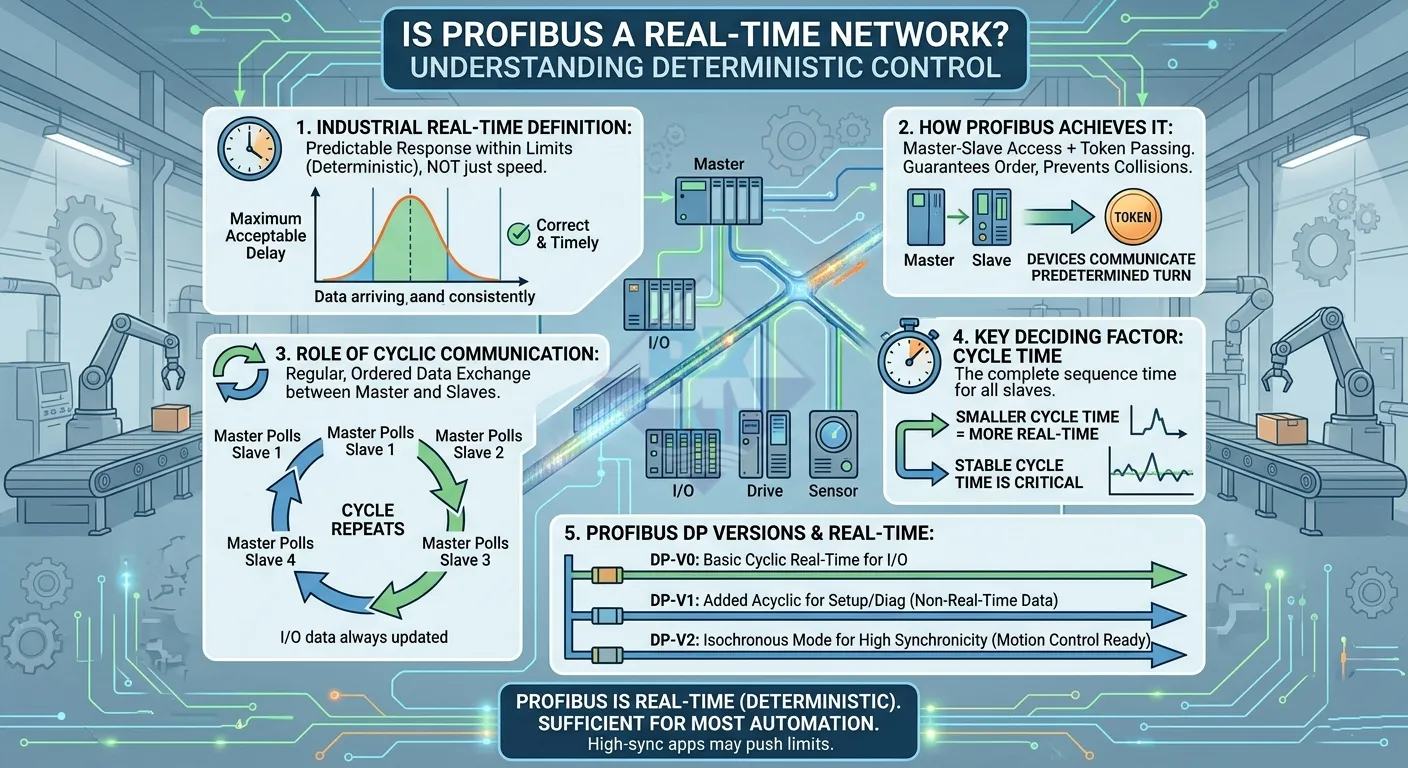
Trong tự động hóa, “real-time” không đơn thuần là nhanh, mà là khả năng đảm bảo thời gian phản hồi nằm trong một giới hạn xác định và có thể dự đoán trước (deterministic).
Điều này có nghĩa là hệ thống không chỉ phản hồi nhanh, mà quan trọng hơn là phản hồi đúng thời điểm, lặp lại ổn định theo chu kỳ. Đây chính là yếu tố cốt lõi trong các hệ thống điều khiển công nghiệp.
2. PROFIBUS có phải là mạng real-time?
Câu trả lời là: Có – nhưng là real-time theo nghĩa deterministic.
PROFIBUS sử dụng cơ chế Master-Slave kết hợp với token passing để điều phối truy cập bus. Điều này đảm bảo rằng mỗi thiết bị đều được giao tiếp theo một thứ tự xác định, không xảy ra xung đột ngẫu nhiên như các mạng Ethernet truyền thống.
Bạn có thể xem chi tiết cơ chế này tại bài Master-Slave hoạt động như thế nào và token passing PROFIBUS.
Chính cơ chế này giúp PROFIBUS đạt được tính deterministic – nền tảng của real-time trong công nghiệp.
3. Vai trò của Cyclic communication trong real-time
Khả năng real-time của PROFIBUS đến từ cơ chế truyền thông theo chu kỳ (cyclic). Trong mỗi vòng quét, Master sẽ trao đổi dữ liệu với toàn bộ Slave theo thứ tự cố định.
Điều này đảm bảo rằng dữ liệu I/O luôn được cập nhật đều đặn theo thời gian, không bị trễ ngẫu nhiên. Nếu bạn chưa rõ sự khác biệt giữa cyclic và acyclic, hãy xem thêm tại bài Cyclic vs Acyclic.
4. Cycle time – yếu tố quyết định real-time
Real-time của PROFIBUS không thể tách rời khỏi cycle time. Đây là khoảng thời gian để Master hoàn thành một vòng giao tiếp với tất cả Slave.
Cycle time càng nhỏ và ổn định, hệ thống càng gần với “real-time lý tưởng”. Ngược lại, nếu cycle time lớn hoặc dao động (jitter), hệ thống sẽ mất tính chính xác.
Bạn có thể xem chi tiết cách tính và tối ưu tại bài cycle time PROFIBUS.
5. Sự khác biệt giữa DP-V0, V1 và V2
Không phải tất cả các phiên bản PROFIBUS đều có mức độ real-time giống nhau.
DP-V0 cung cấp cyclic communication với khả năng real-time cơ bản, phù hợp cho điều khiển I/O thông thường. DP-V1 bổ sung acyclic communication, nhưng phần này không phục vụ real-time mà phục vụ cấu hình và chẩn đoán.
Đến DP-V2, PROFIBUS bắt đầu hỗ trợ các cơ chế nâng cao như isochronous mode, cho phép đồng bộ hóa thời gian chính xác giữa các thiết bị – đây là nền tảng cho các ứng dụng motion control.
Bạn có thể xem chi tiết hơn tại bài so sánh DP-V0, V1, V2.
6. PROFIBUS có đủ cho hệ thống real-time cao không?
Trong phần lớn ứng dụng công nghiệp (I/O, biến tần, điều khiển quá trình), PROFIBUS hoàn toàn đáp ứng yêu cầu real-time với cycle time từ vài ms.
Tuy nhiên, với các ứng dụng yêu cầu đồng bộ cực cao (robot, CNC, multi-axis servo), PROFIBUS có thể gặp giới hạn so với các giao thức Ethernet real-time hiện đại.
Kết luận
PROFIBUS là một mạng real-time theo nghĩa deterministic – tức là đảm bảo thời gian truyền thông có thể dự đoán và ổn định. Đây là yếu tố đủ để đáp ứng hầu hết các hệ thống tự động hóa công nghiệp.
Tuy nhiên, mức độ real-time của PROFIBUS phụ thuộc vào cấu hình hệ thống, cycle time và phiên bản DP sử dụng. Việc hiểu rõ những yếu tố này sẽ giúp bạn thiết kế hệ thống tối ưu và tránh các giới hạn không cần thiết.